
Do ponto de vista da estrutura funcional, a execução do gerador de vácuo é principalmente a válvula de controle eletromagnética para controlar o gerador de vácuo para realizar a geração e parada de pressão negativa, de modo a atingir a função de atrair e liberar a peça de trabalho.
Como resultado, o sistema inclui geralmente os seguintes componentes: 1. Fonte de ar comprimido;2. Filtro;3. Interruptor da válvula solenóide;4. Atuador de vácuo;5. Ventosa final, airbag, etc. (uma estrutura típica é mostrada na figura abaixo).
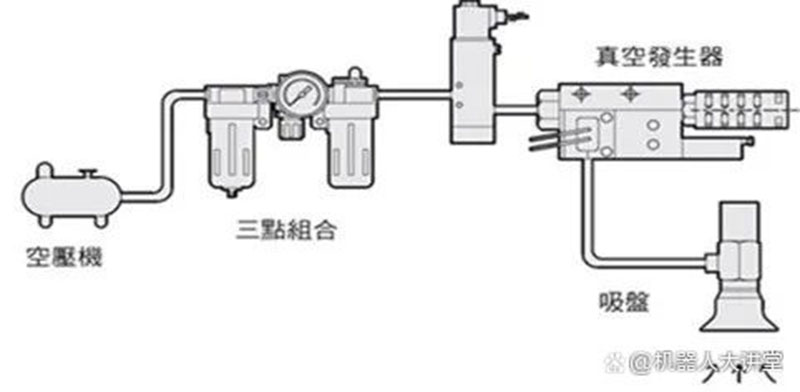
Além disso, de acordo com os requisitos da automação industrial, a fim de realizar o monitoramento do processo de adsorção a vácuo, alguns fabricantes geralmente adicionam componentes de controle pneumático, como medidores de vazão, interruptores de detecção de pressão e interruptores de proximidade ao sistema nos últimos anos.
No entanto, como a maioria dos componentes são modificados pelo integrador de acordo com as necessidades do cliente e as condições de trabalho no local, a complexidade de todo o sistema é muitas vezes elevada.
Ao mesmo tempo, vários fabricantes de componentes conduzem a trabalhos complexos de instalação e comissionamento no local, e alguns deles têm alto consumo de energia e 100% de dependência de fontes de gás.A integração parcial pode não ser possível
Evite a poluição sonora, o que significa problemas inaceitáveis para ambientes de alta precisão e altamente limpos, como baterias de lítio e semicondutores.
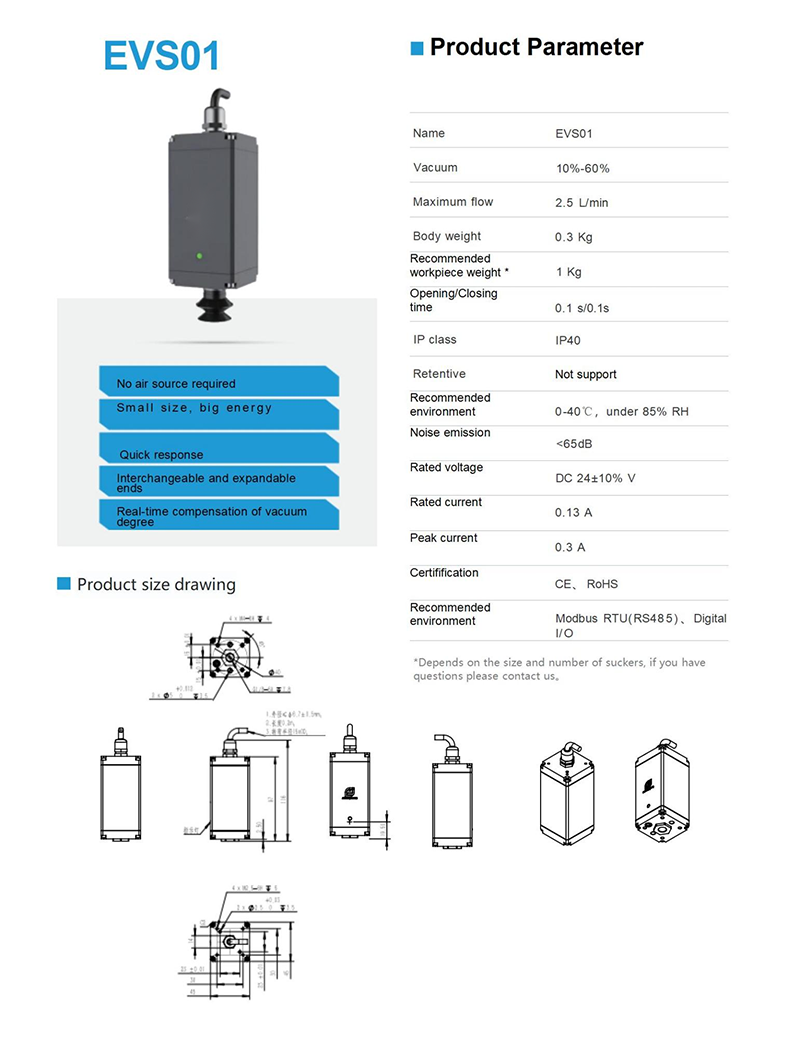
No geral, o EVS é uma nova geração de atuadores elétricos a vácuo inteligentes que não requerem fonte adicional de ar comprimido, o que é sem dúvida atraente.
O maior benefício do sistema de economia de ar é a facilidade de instalação.Porque isso pode, sem dúvida, reduzir muitos componentes auxiliares, incluindo compressores de ar, tanques de armazenamento de ar, equipamentos de purificação de ar e tubos de saída, etc., tornando a fiação mais fácil, conveniente e clara para o uso dos clientes.
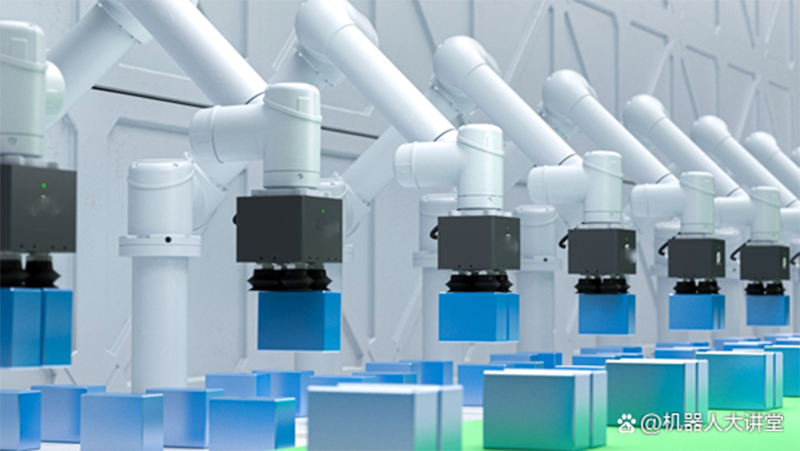
É relatado que atualmente muitas cenas, incluindo plataformas de robôs móveis, montagem eletrônica 3C, fabricação de baterias de lítio, fabricação de semicondutores, logística expressa, etc., têm um layout de espaço relativamente compacto.
Bateria quadrada de sucção EVS08
Mais detalhes e vantagens
A sala de aula do robô aprendeu que este produto, que parece muito pequeno e pesa apenas 2,5kg, pode atingir um alto nível de 10kg.Devido ao design de baixa tensão de 24 V, o consumo de energia é de 20% do sistema pneumático tradicional, e a força de adsorção no final pode ser definida e ajustada, e a força de adsorção pode atingir 102-510N.
Em termos de projeto estrutural, o EVS adota um projeto estrutural mais compacto e leve, o que torna o EVS 30% menor que a aerodinâmica tradicional para o mesmo peso de carga.
Ao mesmo tempo, pode ser conectado diretamente ao conector na extremidade do braço robótico, o que reduz componentes auxiliares redundantes, torna-o mais flexível de usar, pode ser implantado rapidamente e pode absorver facilmente vários objetos grandes, especialmente adequado para empilhamento, manuseio e outras operações de cena.
Para melhorar a comodidade de uso, o atuador elétrico a vácuo também possui uma interface integrada, que pode ser utilizada para controlar e monitorar todo o processo de adsorção de objetos.
É relatado que isso é para conveniência dos clientes controlarem o grau de vácuo do atuador de vácuo por meio de instruções, e também conectarem-se através do link IO para monitoramento e manutenção preditiva do processo de adsorção.O monitoramento do status reduzirá erros e tempo de inatividade e garantirá a disponibilidade do sistema.
Nesta base, as vantagens e características do SVE reflectem-se também nos seguintes pontos:
1. Estrutura compacta e peso leve: EVS é 30% menor que o tamanho pneumático tradicional ao absorver o mesmo peso de carga.Pode ser conectado ao conector na extremidade do braço mecânico para realizar a absorção da carga, especialmente adequado para empilhamento, manuseio e outras operações de cenário;
2. Configuração terminal abundante: Vários tipos de ventosas, airbags e outros componentes podem ser configurados para realizar a apreensão de diferentes objetos, incluindo componentes quadrados, esféricos e de formato especial;
3. Os canais duplos podem ser controlados de forma independente: controlam facilmente os lados esquerdo e direito do atuador a vácuo, e os dois lados são independentes um do outro, melhorando ainda mais a eficiência de trabalho da linha de produção.Realiza sucção e posicionamento ao mesmo tempo, o que facilita muito o manuseio e classificação de objetos, economizando espaço e tempo;
4. Sucção ajustável: o grau de vácuo pode ser ajustado de acordo com as características do produto sugado, e a compensação de vácuo em tempo real pode ser realizada;
5. Feedback de status: Possui um sensor de feedback de vácuo, que pode detectar o status de adsorção de objetos em tempo real e fornecer feedback e alarme;
6. Proteção de desligamento: Após o desligamento, ele pode realizar o travamento automático de desligamento de adsorção para proteger os objetos adsorvidos;
7. Forte adaptabilidade: suporte ao protocolo de comunicação 24V I/O e MODBUS RTU (RS485);
8. Fácil de instalar e depurar: o protocolo de comunicação é simples e legível, o que reduz bastante a dificuldade de depuração.Além disso, o software de depuração do computador host pode ser anexado como presente, que pode ser definido e editado para definir parâmetros de função offline.
Conclusão e o futuro
Seguindo a tendência de automação e inteligência, os atuadores elétricos a vácuo têm se tornado cada vez mais um componente chave para garantir o funcionamento normal de robôs e sistemas de automação, tornando o uso de sistemas de atuadores elétricos mais conveniente e fácil de usar, podendo atender cenários mais diversificados, como como robôs compostos móveis..
A interface integrada e a rica configuração do terminal e outras otimizações podem melhorar ainda mais a confiabilidade dos principais componentes do robô, reduzir paradas de produção e problemas de implantação remota para usuários finais e reduzir ainda mais os custos de manutenção e pós-venda.
Horário da postagem: 19 de abril de 2023